Intelligente Robotiksysteme bieten ein enormes Potential zur Umsetzung agiler und flexibler Automatisierungslösungen.
Die autonome Robotik stellt einen wesentlichen Bestandteil der Industrie-4.0 Strategie des IaAM dar. Prof. Dr. Stephan Kallweit leitet als Lehrgebietsinhaber für Robotik und Automatisierung die entsprechende Arbeitsgruppe „Mobile autonome Systeme“ des IaAM. Die Arbeitsgruppe befasst sich mit den drei grundlegenden Themenbereichen Umgebungswahrnehmung, autonome Navigation und Manipulation sowie der Mensch-Roboter Interkation.
Damit ein Robotersystem autonom navigieren kann, muss es in der Lage sein seine Umgebung zu erfassen und deren grundlegende Struktur zu kartographieren. Es muss jederzeit wissen, wo es sich befindet (Lokalisierung), und einen kollisionsfreien Weg zu seinem Zielpunkt ermitteln (Pfadplanung). Durch Methoden der probabilistischen Robotik können autonome Robotersysteme auch in komplexen und unstrukturierten Umgebungen, wie sie eine industrielle Produktionsstraße darstellt, robust navigieren. Kollaborative Manipulatoren und entsprechende Sicherheitssensorik schaffen einen Arbeitsraum, in dem Roboter und Mensch gemeinsam arbeiten und sich gegenseitig unterstützen. Durch Methoden der künstlichen Intelligenz – speziell aus dem Bereich maschinelles Lernen – sind komplexe Aufgabenstellungen, z.B. aus dem Themenfeld der Manipulation, auch unter wechselnden Umgebungsparametern mit einer hohen Wiederholgenauigkeit lösbar. Solche lernenden Systeme besitzen ein großes Potential in einer Vielzahl von Anwendungsbereichen.
Im Fokus der Forschungsaktivitäten der Arbeitsgruppe steht die Implementierung neuartiger Methoden zur Generierung zukünftiger industrieller Applikationen.
Entwicklung eines Prüfprozesses, welcher die individuellen der NutzerInnen berücksichtigt zur dient zur Quantifizierung der Leistung von Exoskeletten für die unteren Extremitäten.
Das Labor for autonome Robotik verfügt über eine umfangreiche Anlagenausstattung bestehend aus verschiedenen Robotik-Systemen und entsprechender Sensorik. Hierzu zählen unter anderem:
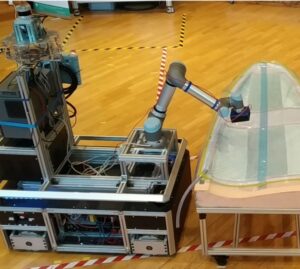
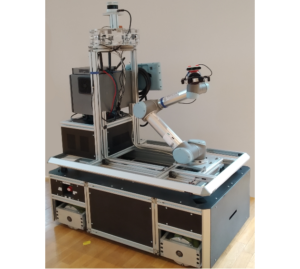
Die Eigententwicklung eines mobilen Manipulators – OMNIVIL
Diverse Industriebbroboter: Yaskawa HC10, Yaskawa SIA-10, UR5