Autonomer mobiler Manipulator für den Einsatz in industriellen Anwendungen
Autonomer mobiler Manipulator - OMNIVIL.
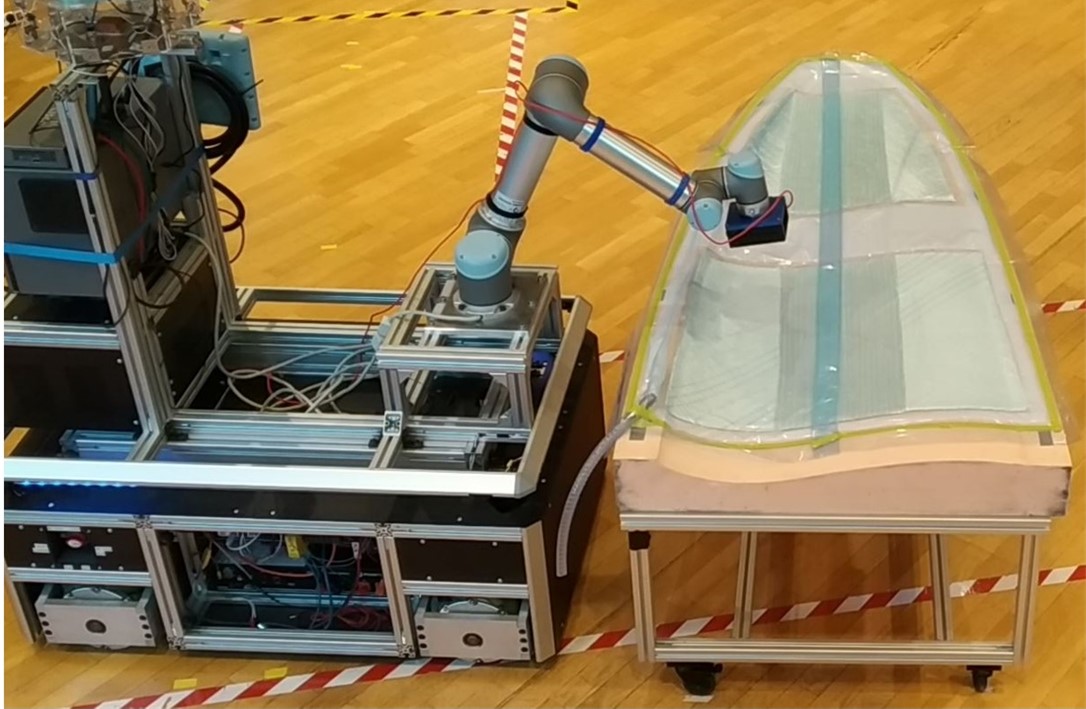
Der mobile Manipulator OMNIVIL basiert auf einer selbst entwickelten mobilen Plattform. Dank seiner holonomen Kinematik bietet OMNIVIL eine hohe Manövrierfähigkeit, wodurch auch komplexe Navigationsaufgaben in dynamischen und unstrukturierten Umgebungen lösbar sind.
Das holistische Konzept von OMNIVIL beinhaltet drei Kernentwicklungen:
Das redundante Workspace Monitoring System erkennt nicht nur Hindernisse, sondern ist auch in der Lage gezielt menschliche Arbeiter im direkten Umfeld des Roboters zu klassifizieren. Hierzu verwendet das System eine Kombination aus Thermal- und RGB-Kameras sowie Lidar-Sensoren. Eine Analyse der Daten wird mit Hilfe von Deep Convolutional Neural Networks durchgeführt.
Das flexible, zonenbasierte Navigationskonzept wurde speziell für den Einsatz in industriellen Umgebungen entwickelt. Es ist einfach skalierbar und ermöglicht die Festlegung von statischen wie auch dynamischen Zonen. Das Konzept realisiert ein case-based Verhalten des Roboters, wodurch die Mensch-Maschine-Kooperation signifikant verbessert wird.
Die entwickelte Manipulationsstrategie basiert auf einer neuen Methode zur Analyse der Roboter-Charakteristik in Bezug auf die Erreichbarkeit und Manipulierbarkeit des verwendeten Manipulators.
Eingesetzt wird der autonome mobile Manipulator unter anderem in dem Forschungsvorhaben FiberRadar.