Das IAAM bietet diverse internationale Schulungenkonzepte an. Neben der Ausbildung im Bereich von Forschungsinstituten und Universitäten, sind auch praxisnahe Weiterbildungenmöglichkeiten für Beschäftigte der Industrie möglich.
Robot Operating System
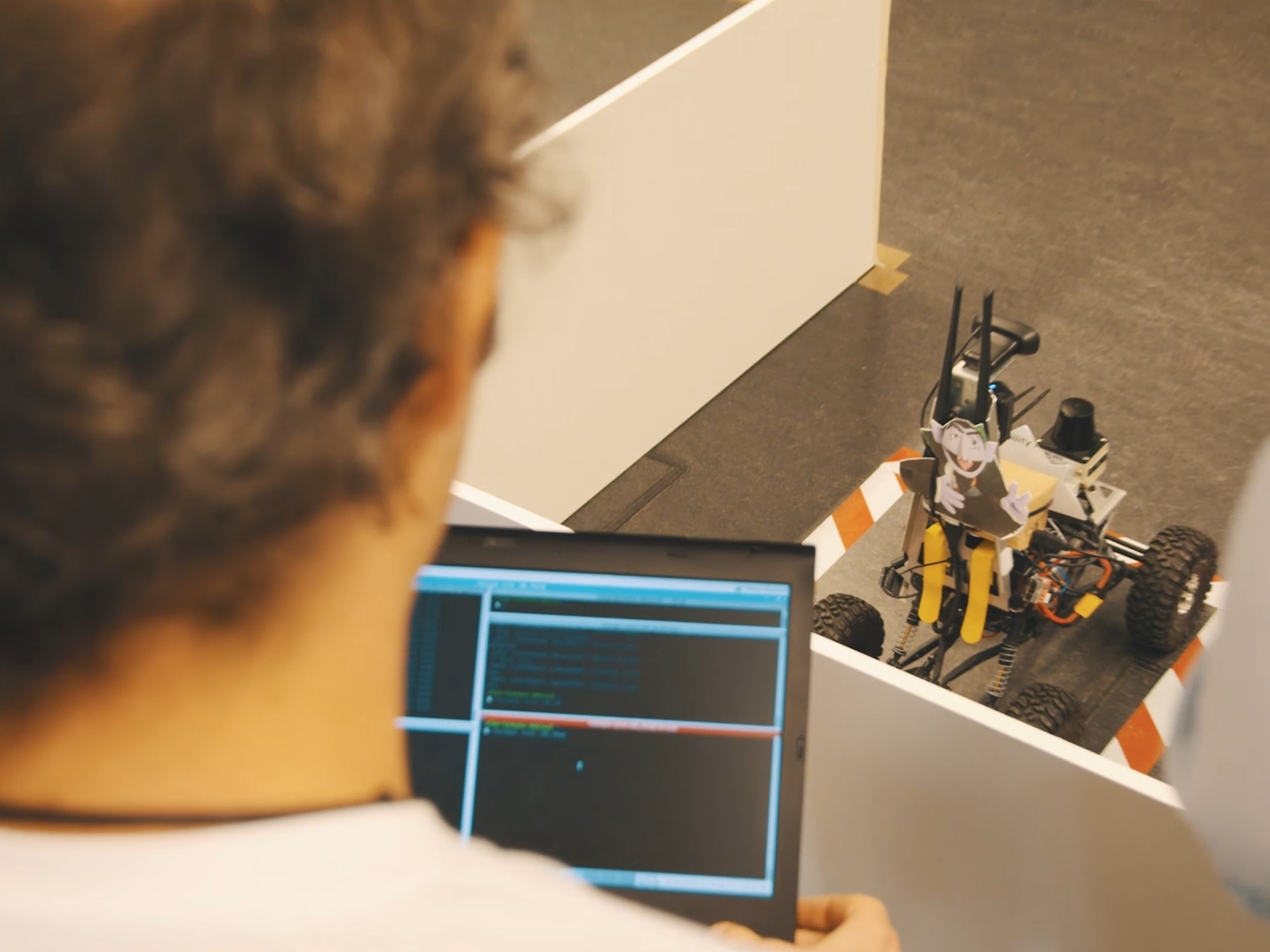
Unsere erste ROS Summer School in 2012 zeigte, dass ein großes Interesse an Schulungen im Bereich der autonomen mobilen Robotik besteht. Das umfangreiche Forschungsfeld macht es insbesondere Anfängern relativ schwer Fuß zu fassen. Durch ein praxisnahes Lernkonzept wird den Teilnehmer in kurzer Zeit der richtige Umgang mit Robotik-Systemen und dem entsprechenden Robotik-Framework nähergebracht. Hierzu wird ein mobiler Roboter verwendet, welcher auf dem Framework ROS (Robot Operating System) aufbaut.
Die Philosophy unserer ROS Summer School ist: „Learning by doing to get hands-on experience“.
Der 3D-Druck steht kurz davor die Art und Weise wie wir Produkte entwerfen und herstellen zu revolutionieren. Daher ist es für die technisch Interessierten unerlässlich, die Fähigkeiten, Herausforderungen und Nachteile dieser Technologie zu verstehen. Während diese Technologie auch in privaten Bereichen wie Zeitschriften und Fernsehen einen Hype erfährt, findet sie in der Ingenieurausbildung kaum Beachtung.
Unsere Sommerschule bietet einen umfassenden, theoretischen Zugang zur 3D-Technologie kombiniert mit praktischer Erfahrung.
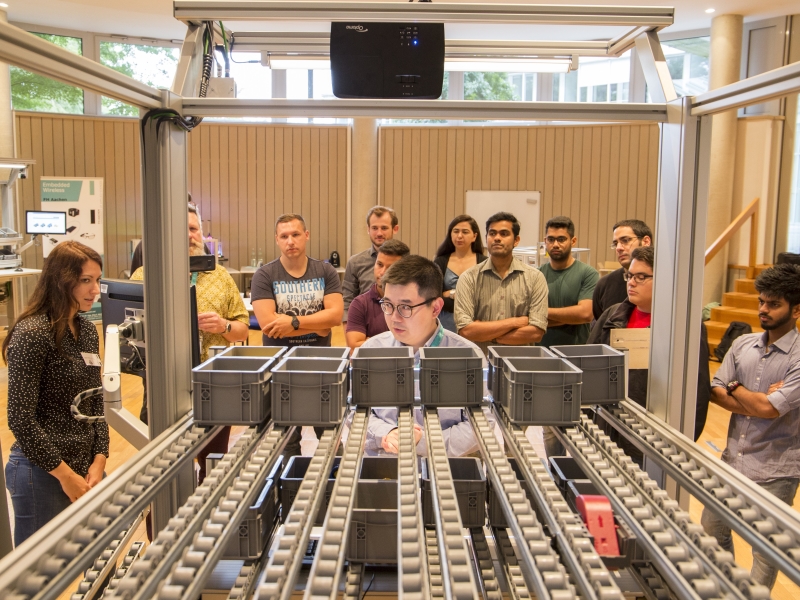
Die Schulung „Industrie 4.0“ gibt einen Einblick in die Ziele und Strategien von Industrie 4.0. Die Teilnehmer erfahren den aktuellen Stand der Aktivitäten und Ideen rund um Industrie 4.0 und wie man davon schon heute profitieren kann. Neben einer theoretischen Einführung in Industrie 4.0, werden die wichtigsten Technologien und Prozesse für die Implementierung von Industrie 4.0 vorgestellt und in einem Workshop vertieft.
Ziel ist es, die Digitalisierung vorran zu treiben. Ausgehend vom Prozess selbst wird die Digitalisierung von Prozessen eingeführt und anhand von praktischen Beispielen erweitert. Anhand eines Modellsystems werden die technologischen Möglichkeiten aufgezeigt.